Next: About this document ... Up: Simple Harmonic Motion Previous: Overdamping:
You've heard the story of the singer who can shatter a glass just by singing a particular note real loudly. Well that may or may not be true, but it's an example of resonance. When you hear annoying buzzing sounds in your car, it is often something ``resonating" with the car engine. When a child, or adult, is on a swing, they can increase their amplitude of oscillation by ``pumping" the swing at just the right moments. That's also an example of resonance.
But resonance is even more common than that. Atoms is materials especially one with colors, resonate when light hits them. Light by the way applies a high frequency periodic force to electrons in a material. A microwave oven works on a similar principle. The microwaves apply periodic forces to water molecules causing them to resonate, and hence heat up. You might have seen some spectacular footage of some huge bridge collapsing right after it was built. That was an example of resonance. The wind was applying forces at just the right frequency to get the whole thing to swing wildly back and forth, ultimately collapsing.
So let's try to understand resonance. What you've got is a mass on a spring
with some friction. You apply some periodic force at some frequency,
and ask how much the system moves. If you apply it at just the right frequency
and the damping isn't too big, you'd expect a small force would give
a large response. Let's try to write down the equation we want to solve.
![]() now includes, the spring
now includes, the spring ![]() , damping
, damping ![]() , and an external
force
, and an external
force
![]() . We've added in a phase shift
of
. We've added in a phase shift
of ![]() because the applied force is not necessarily in phase
with the harmonic motion. We'll talk more about that below. So
because the applied force is not necessarily in phase
with the harmonic motion. We'll talk more about that below. So
| (1.78) |
| (1.79) |
Hmm, this looks even worse than the damped harmonic oscillator because now the
right hand side isn't zero! Well fortunately there's a simple way of figuring
this out without too much algebra. The hard way would be to try a
solution of the form
| (1.80) |
| (1.81) |
What does this problem look like? Well we've already seen that it involves a bungey
cord with
![]() . But now we also have friction
. But now we also have friction
![]() .
And now we have an external force
.
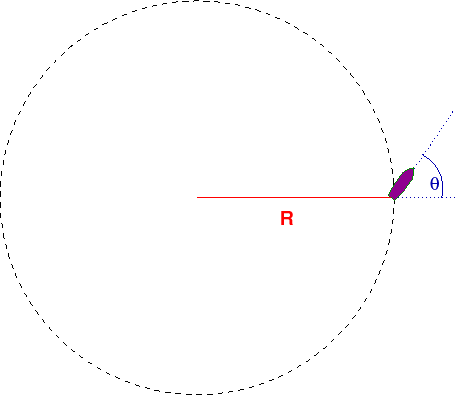
And now we have an external force ![]() . You can think of this
external force as being applied to the object in some direction and the whole
thing rotating around in a circle.
. You can think of this
external force as being applied to the object in some direction and the whole
thing rotating around in a circle.
This is a lot like jetskiing in water with a bungey cord attached to a buoy.
The external force is applied by the motor of the jetski and if it's
pointing in just the right direction, it'll go round the buoy in a
circular path. The angle between the jetski and the radius
vector stays constant at ![]() .
.
We remember that if you consider just the x-component of the
two dimensional problem, you should get the 1d problem. Let's check
that it works. If we consider the x component of
![]() you get
you get ![]() . That looks OK. How about
. That looks OK. How about ![]() ? The angle that
this makes with the x axis is
? The angle that
this makes with the x axis is
![]() , so you get an
x component of
, so you get an
x component of
![]() . That is the same as
. That is the same as
![]() if you just make
if you just make ![]() the magnitude
of
the magnitude
of ![]() . So this two dimensional equation has as its x component
the one dimensional equation we want to solve. The radius vector
has an x component
. So this two dimensional equation has as its x component
the one dimensional equation we want to solve. The radius vector
has an x component
![]() . So
. So ![]() is the amplitude
of oscillation of the 1d problem. This is all similar to what we
did before for simple harmonic motion in section 1.1.5.
is the amplitude
of oscillation of the 1d problem. This is all similar to what we
did before for simple harmonic motion in section 1.1.5.
Let's try to figure out how the radius of the
circle ![]() , is related to the force that's applied and the angular
velocity. Again we're applying
, is related to the force that's applied and the angular
velocity. Again we're applying
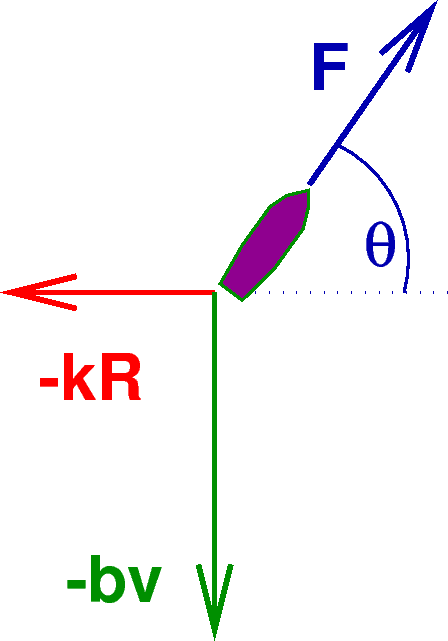
![]() . Now the free
body diagram looks like
. Now the free
body diagram looks like
So we have
| (1.82) |
Here we've used ![]() and
and
![]() .
Solving for
.
Solving for ![]()
| (1.83) |
This tells us the direction and magnitude of the force necessary to keep
the jetski going around the circle. It has a magnitude
| (1.84) |
or
| (1.85) |
and
| (1.86) |
Good, we've now understood the bungey cord - jetski problem, let's try to relate it back to the one dimensional resonance problem.
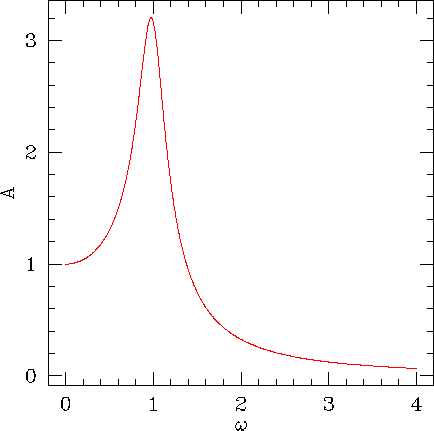
This says that if you apply a force with amplitude ![]() , that the
amplitude of resonance will just be as given above. Let's plot
how this looks, taking
, that the
amplitude of resonance will just be as given above. Let's plot
how this looks, taking
![]() and
and ![]() .
.
You see that the amplitude has a strong maximum close to
![]() . Frequencies close to that are
at resonance. The smaller the damping
. Frequencies close to that are
at resonance. The smaller the damping ![]() is, the stronger
the maximum, and the sharper the peak.
is, the stronger
the maximum, and the sharper the peak.
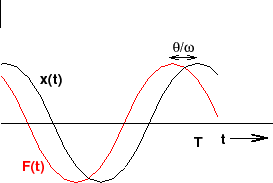
Now what about this mysterious angle ![]() ? This says
that if you apply a force, the response to it,
? This says
that if you apply a force, the response to it, ![]() will not be instantaneous
by will be shifted in phase by an angle
will not be instantaneous
by will be shifted in phase by an angle ![]() as shown below.
as shown below.
Close to resonance when
![]() , you can see that
, you can see that
![]() .
There is a 90 degree phase shift between the applied force and the displacement.
.
There is a 90 degree phase shift between the applied force and the displacement.
josh 2010-01-05